바퀴 달린 두 다리 로봇
바퀴 달린 두 다리 로봇
무언가 무언가 다리달린 녀석 #

아마 올해 초 즈음이였을건데요, 썸네일을 보고 우연히 한 영상을 클릭하게 되었습니다.
항상 밀쳐지고 때리고 던져지고 하는 보스턴 다이나믹스의 로봇처럼 이녀석은 또 무슨 죄를 지은건가 하며 보게 된 영상은 두 다리와 바퀴가 달린 로봇을 만드는 과정이었습니다. 당시 오~ 멋진데 하고 넘겼던것 같습니다. 그런데 최근 들어 또 이 영상이 유튜브 피드에 나오더라고요. 순간 갑자기 만들어보고 싶다는 생각이 들게 되었습니다.
마침 10인치 홈랩도 마무리되어가겠다 이참에 로봇을 만들어보기로 했습니다.
Impulse 뜯어보기 #

Impulse — Aaed Musa
www.aaedmusa.com위에서 언급한 영상의 블로그입니다. 블로그에 언급된 내용을 박박 긁어갈 작정입니다.
MCU #

Teensy 4.1, 뭔가 대박이다 싶은 DIY 프로젝트들을 보면 전부 Teensy를 사용하는 느낌입니다. 검색해보니 조금 생소한 NXP의 MCU입니다. 세상에 무슨 1MB 메모리에 600MHz의 깡성능이라니.. 그러면서 저렴하기 까지 하니 아두이노에서 사용하더라도 힘을 잘 내주는것 같습니다. 개인적으로는 RP2040을 선호하기 때문에 RP2040 또는 새로 나온 RP2350을 사용하기로 했습니다.
모터 #

모터는 알쏭달쏭합니다.
오래 전에 전동보드를 만들어보며 BLDC모터를 사용해봤다 보니 가끔 BLDC모터가 튀어나올 때 마다 반갑기는 했는데요, 전동보드때는 대충 크고 아름다운 모터와 ESC를 골라 몇백 암페어를 집어넣으면 자동차도 끌어줬습니다. 문제는 로봇은 우아하게(?) 각도 제어를 해야 한다는 거죠. 제한된 공간에서 원하는 속도와 토크를 만족하는 마법같은 모터를 찾아야 했습니다. 그리고 제어 역시 단순하게 속도 제어만 가능한 ESC 이외에 다른 컨트롤러가 필요합니다.
바로 옆에 정답지가 있는데 고민하면 안되죠.

영상에서 사용한 모터와 제어기를 그대로 사용하려 했.. 는데 ODrie Micro가 하필이면 품절이네요.

다행인지 모터 구매 옵션 중 드라이버 딸린 버전이 있더라고요. 모터의 기본 드라이버와 다른 여러 드라이버를 비교한 글에서 기본 드라이버도 꽤 괜찮다는 이야기가 있어서 기본 드라이버를 사용해보기로 했습니다. 처음에는 품절임박이라는 글씨를 보고 넵다 “motor with driver” 옵션을 구매했다가, second encoder라는 녀석이 기어비를 거친 모터 축의 절대 위치를 알려준다고 해서 취소하고 “with second encoder” 옵션을 구매했습니다.

10만원짜리 모터라니.. 두근두근 기대됩니다.

남은 바퀴 모터는 허브 모터를 개조해 사용했다고 했습니다.
허브모터도 정말 귀여워보이지만 고무 타이어가 달린 바퀴를 사용하고 싶어서 우선은 다리부터 만들어보기로 하고 바퀴 모터는 천천히 찾아보기로 했습니다. 정말 고맙게도 모터의 사양(60 KV, 2.66 Nm)을 블로그에 메모해둬서 비슷한 모터를 찾기 편할것 같습니다. 멋져보이는 다른 로봇은 eX8108 라는 105 KV, 2 Nm 모터를, 또 다른 로봇은 20KV, 2.4~4.5 Nm 모터를 사용하니 나중에 대충 그 근처로 선정하면 될 것 같습니다.
제어 #
PID.. 각도와 속도 제어를 위해 PID는 몇번 사용해본 적이 있는데 어떻게 해야 로봇이 넘어가지 않게 제어할 수 있는지 감이 잡히지 않습니다. 일단 다리부터 한번 움직여보고 그 뒤를 생각해보려 합니다 ㅋㅋ
참고 자료 #
아 그 참고 자료가 아니구요 제가 나중에 참고하려고 링크 메모해뒀습니다.
도움이 될..지도요..?

This Robot Glides Like an Ice Skater
For the past 6 months, I have been building a wheeled bipedal robot. Meet Impulse!Read more on the technical details of …
youtu.beImpulse — Aaed Musa
www.aaedmusa.com
Design and Control of a Bio-inspired Wheeled Bipedal Robot
Wheeled bipedal robots (WBRs) have the capability to execute agile and versatile locomotion tasks. This paper focuses on …
ar5iv.labs.arxiv.org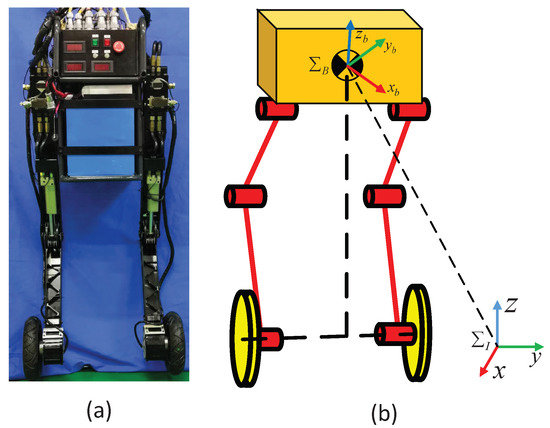
Modeling and Control of a Wheeled Biped Robot
It is difficult to realize the stable control of a wheeled biped robot (WBR), as it is an underactuated nonlinear …
www.mdpi.com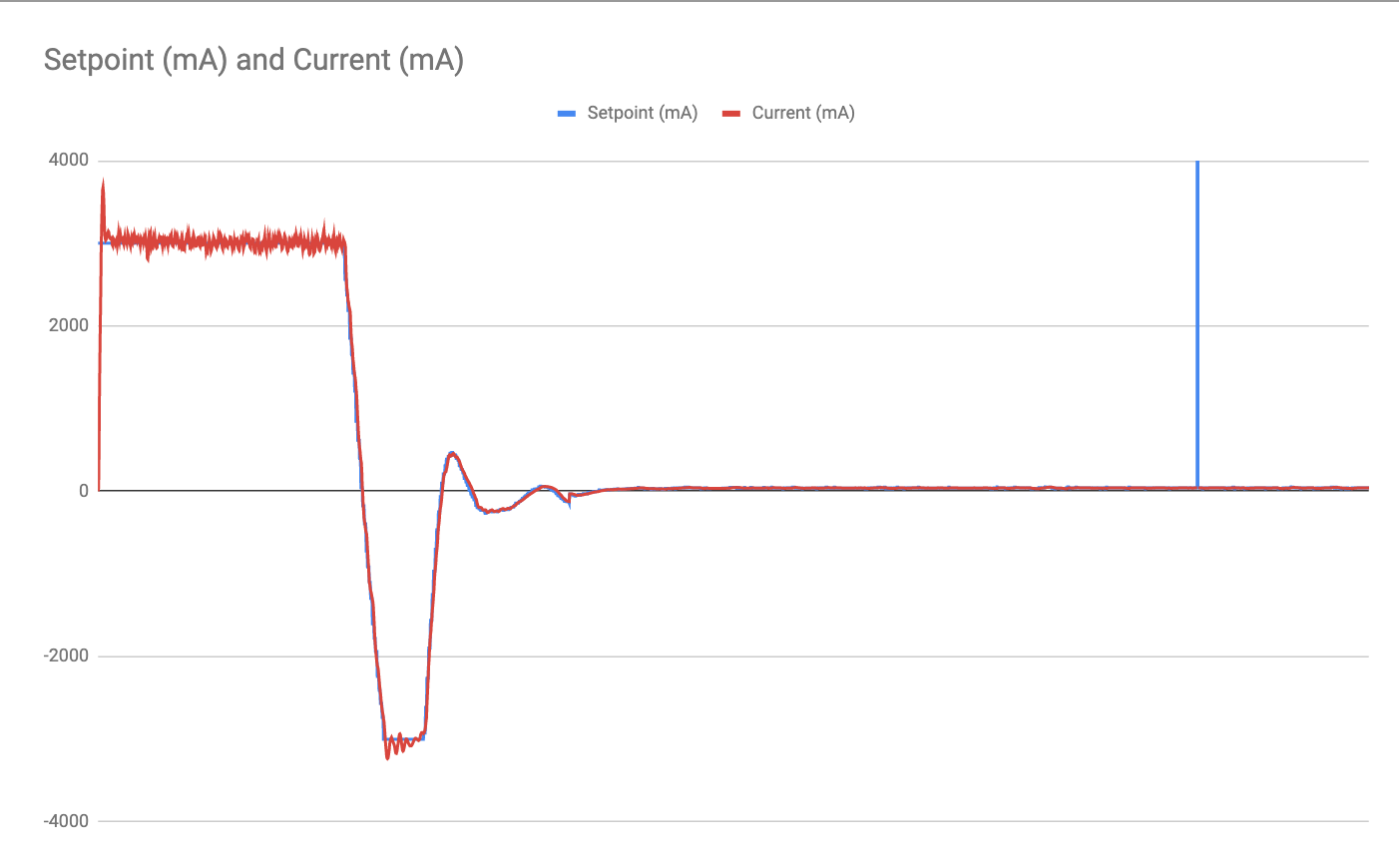
Quadruped Part 1 - Motor Control — ALEX HATTORI
Once again it’s been a while since I last posted! I have a lot to catch up on for my quadruped so time to get started!
www.alex-hattori.comhttps://wiki.control.fel.cvut.cz/mediawiki/images/9/92/Dp_2021_kollarcik_adam.pd …
wiki.control.fel.cvut.czhttps://www.research-collection.ethz.ch/bitstream/handle/20.500.11850/384209/Asc …
www.research-collection.ethz.ch
2023-1 4족보행 로봇(Quadruped robot) 만들기 #3 (다리 설계 1)
앞선 paper study에서 여러 quadruped의 다리 구조를 확인했고, 이를 참고해서 내가 만들 로봇의 구조를 정했다. 구조 결정에 핵심이 됐던 생각들은 아래와 같다. ⓐ mass moment of …
istein.tistory.com![[밸런싱 로봇 만들기] 5. Yaw 움직임을 포함한 동역학 (1)](https://img1.daumcdn.net/thumb/R800x0/?scode=mtistory2&fname=https%3A%2F%2Ft1.daumcdn.net%2Fcfile%2Ftistory%2F110C82264C12ABD121)
[밸런싱 로봇 만들기] 5. Yaw 움직임을 포함한 동역학 (1)
이번 연재는 꽤 길게 끌고 있네요. (연재의 길이가 길어지는 거라면 차라리 좋은데, 연재간 간격이 길어지고 있네요...ㅠㅠ) 요즘 기말고사 채점과 계절학기 수업 준비, 그리고 가장 큰 것은 논문준비로 인해서 입니다. …
pinkwink.kr