Posts전체 글 992026년 04월 09일 Dev Boards RandomGD32E230C8T6 개발보드 핸즈온 (feat. GD-Link V3)ST.. 아니 GD32!! 그 중에서도 저렴이 MCU인 GD32E230C8T6 개발보드와 공식 디버거 GD-Link V3를 간단히 살펴봤습니다. GigaDevice GD32E230 Cortex-M232026년 04월 04일 Projects IoT[스마트 굴비] nRF Connect SDK Matter 조명 구현nRF54L15와 nRF Connect SDK 예제를 바탕으로 Matter 조명을 구현하며 초기 구조, Cluster 처리 방식, 콜백 흐름을 정리한 프로젝트 기록입니다. 아 그나저나 굴비 아니고 명태이긴 해요 nRF54L15 Matter nRF Connect SDK2026년 04월 02일 Hobby HomeLabGUI restic 도구, BackrestVM의 Docker 디스크를 AWS S3 호환 스토리지(Storj)에 백업하기 위해 restic GUI wrapper인 Backrest를 사용해보았습니다. backrest restic storj2026년 03월 29일 Hobby BlogHugo 블로그로 이주하기3년 가량 사용하던 Notion 블로그(oopy)를 뒤로하고 Hugo 블로그로 이주하게 되었습니다. Hugo를 사용하게 된 이유, 설정한 과정 등을 소개합니다. Hugo Nginx Self-Host2026년 02월 20일 Dev Boards NordicnRF54L15 DK 핸즈온Nordic의 최신 Matter SoC인 nRF54L15를 맛보기 위해 개발보드를 구매했습니다. Nordic nRF54L15 Cortex-M33 Matter2026년 01월 17일 Firmware GeneralNanoPB에 통신 짬때리기 (Pico-SDK + NanoPB + CRC32 + COBS)통신 날로먹는 방법 NanoPB COBS Pico C SDK2025년 11월 03일 Firmware Arduino아두이노에 Home Assistant 설치하고 LED 껐다켜보기 (feat. Arduino UNO Q)아니 아두이노에도 Home Assistant 설치 된다니까?!!! 내가 해봤다고!!! Arduino Home Assistant2025년 11월 02일 Dev Boards Arduino그래도 아두이노 컨셉은 지켰다, Arduino UNO Q 핸즈온은은하게 느껴지는 똥맛.. Arduino UNO Q의 구석구석을 살펴보고 인공지능 기능을 테스트해봤습니다. Arduino Qualcomm Dragonwing QRB2210 STMicroelectronics2025년 07월 09일 Dev Boards RandomWaveshare RP2350-CAN 핸즈온CAN 통신 모터를 제어하기 위해 CAN 통신을 지원하는 개발보드를 구매했습니다. Waveshare Raspberry Pi RP2350 Cortex-M33 CAN2025년 05월 31일 Projects RobotGIM6010-8 모터 돌려보기 (feat. ODrive)로봇에 사용할 드라이버 일체형 BLDC 모터를 돌려봤습니다. 세상에 이게 돌아가네요 GIM6010-8 ODrive CAN 이전1 2 3 4 5 6 7 8 9 10다음
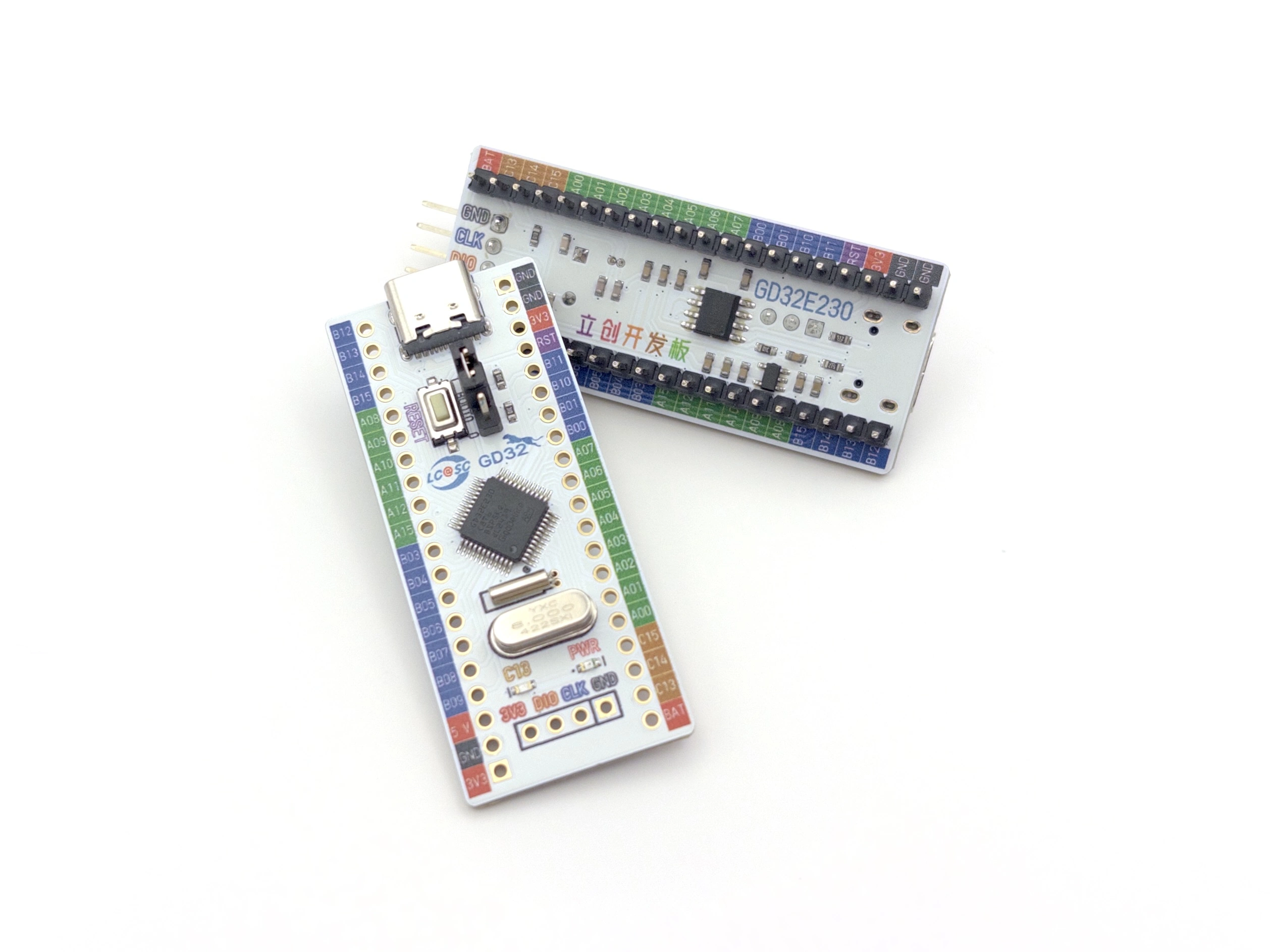
2026년 04월 09일 Dev Boards RandomGD32E230C8T6 개발보드 핸즈온 (feat. GD-Link V3)ST.. 아니 GD32!! 그 중에서도 저렴이 MCU인 GD32E230C8T6 개발보드와 공식 디버거 GD-Link V3를 간단히 살펴봤습니다. GigaDevice GD32E230 Cortex-M23
2026년 04월 04일 Projects IoT[스마트 굴비] nRF Connect SDK Matter 조명 구현nRF54L15와 nRF Connect SDK 예제를 바탕으로 Matter 조명을 구현하며 초기 구조, Cluster 처리 방식, 콜백 흐름을 정리한 프로젝트 기록입니다. 아 그나저나 굴비 아니고 명태이긴 해요 nRF54L15 Matter nRF Connect SDK
2026년 04월 02일 Hobby HomeLabGUI restic 도구, BackrestVM의 Docker 디스크를 AWS S3 호환 스토리지(Storj)에 백업하기 위해 restic GUI wrapper인 Backrest를 사용해보았습니다. backrest restic storj
2026년 03월 29일 Hobby BlogHugo 블로그로 이주하기3년 가량 사용하던 Notion 블로그(oopy)를 뒤로하고 Hugo 블로그로 이주하게 되었습니다. Hugo를 사용하게 된 이유, 설정한 과정 등을 소개합니다. Hugo Nginx Self-Host
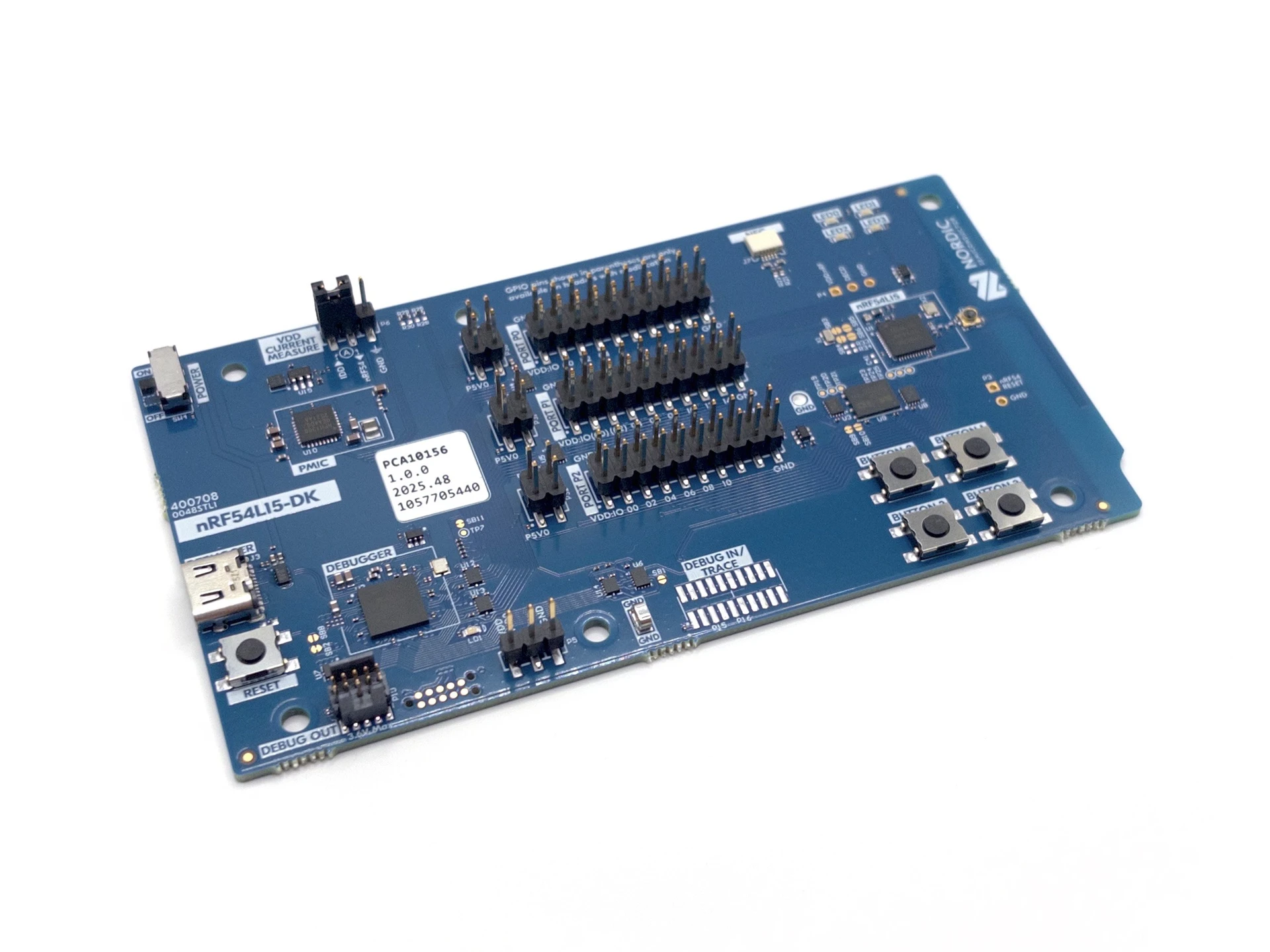
2026년 02월 20일 Dev Boards NordicnRF54L15 DK 핸즈온Nordic의 최신 Matter SoC인 nRF54L15를 맛보기 위해 개발보드를 구매했습니다. Nordic nRF54L15 Cortex-M33 Matter
2026년 01월 17일 Firmware GeneralNanoPB에 통신 짬때리기 (Pico-SDK + NanoPB + CRC32 + COBS)통신 날로먹는 방법 NanoPB COBS Pico C SDK
2025년 11월 03일 Firmware Arduino아두이노에 Home Assistant 설치하고 LED 껐다켜보기 (feat. Arduino UNO Q)아니 아두이노에도 Home Assistant 설치 된다니까?!!! 내가 해봤다고!!! Arduino Home Assistant
2025년 11월 02일 Dev Boards Arduino그래도 아두이노 컨셉은 지켰다, Arduino UNO Q 핸즈온은은하게 느껴지는 똥맛.. Arduino UNO Q의 구석구석을 살펴보고 인공지능 기능을 테스트해봤습니다. Arduino Qualcomm Dragonwing QRB2210 STMicroelectronics
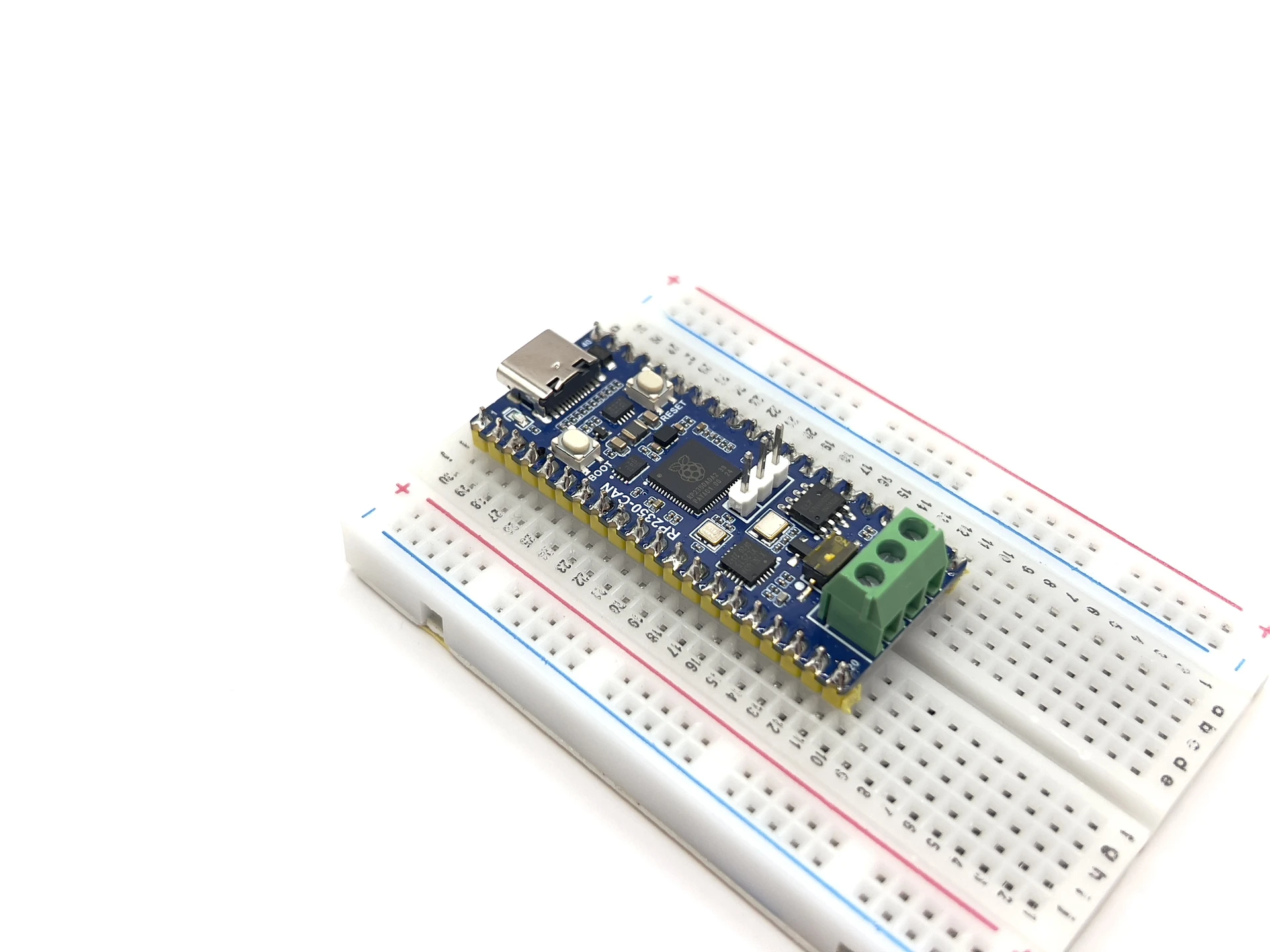
2025년 07월 09일 Dev Boards RandomWaveshare RP2350-CAN 핸즈온CAN 통신 모터를 제어하기 위해 CAN 통신을 지원하는 개발보드를 구매했습니다. Waveshare Raspberry Pi RP2350 Cortex-M33 CAN
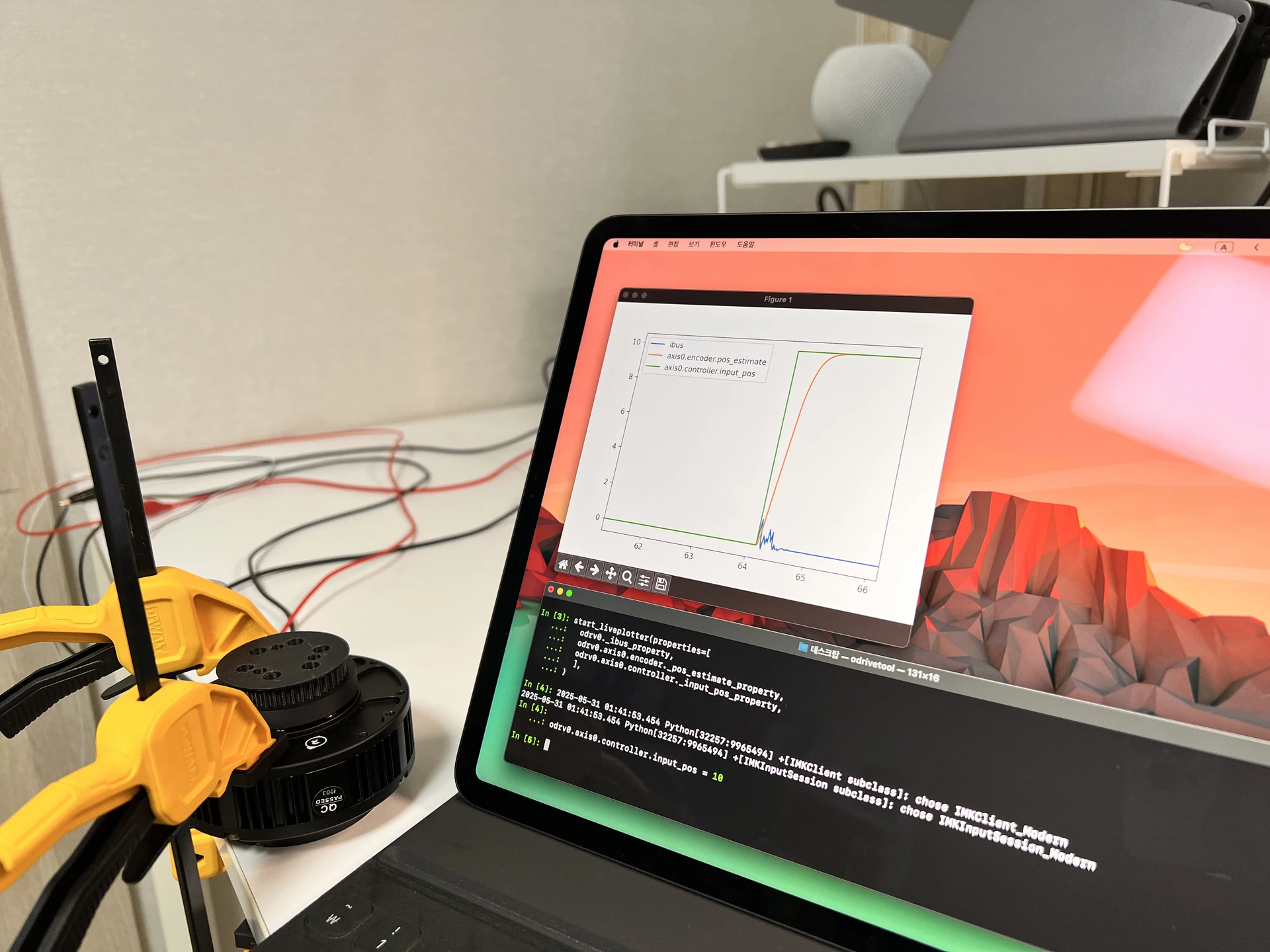
2025년 05월 31일 Projects RobotGIM6010-8 모터 돌려보기 (feat. ODrive)로봇에 사용할 드라이버 일체형 BLDC 모터를 돌려봤습니다. 세상에 이게 돌아가네요 GIM6010-8 ODrive CAN